Hojune Kim
Incoming Master's Student | Stanford University

I am an incoming Master’s student at Stanford University in Aeronautics and Astronautics. Previously, I was fortunate to work at German Aerospace Center (DLR) under the supervision of Prof. Jinoh Lee. I am pursuing my B.S. degree in Aerospace Engineering at Seoul National University, where I was advised by Prof. Ayoung Kim with a focus on perception.
My research centers on robot autonomy, utilizing optimization-based approaches for perception and control. I focus on trustworthy and safe-assured solutions, supported by experimental validation, and aim to expand to cooperative robots that interact with humans.
As a project intern at ETH Zürich, I worked on distributed optimization for continuous-time SLAM and crowd navigation with reinforcement learning. I have also developed an autonomous car and quadcopter through student clubs. Furthermore, I co-organized a non-profit organization for AI education, AI Tech Play, and hosted a nationwide AI camp with an autonomous race car competition for students.
| Nov 20, 2024 | I attended IEEE-RAS Humanoids 2024 Conference and won adult-sized biped walk competition as a TORO team! |
| Sep 1, 2024 | I started working in German Aerospace Center (DLR) as a guest student researcher in humanoid TORO team, funded by Max Plank POSTECH/KOREA. |
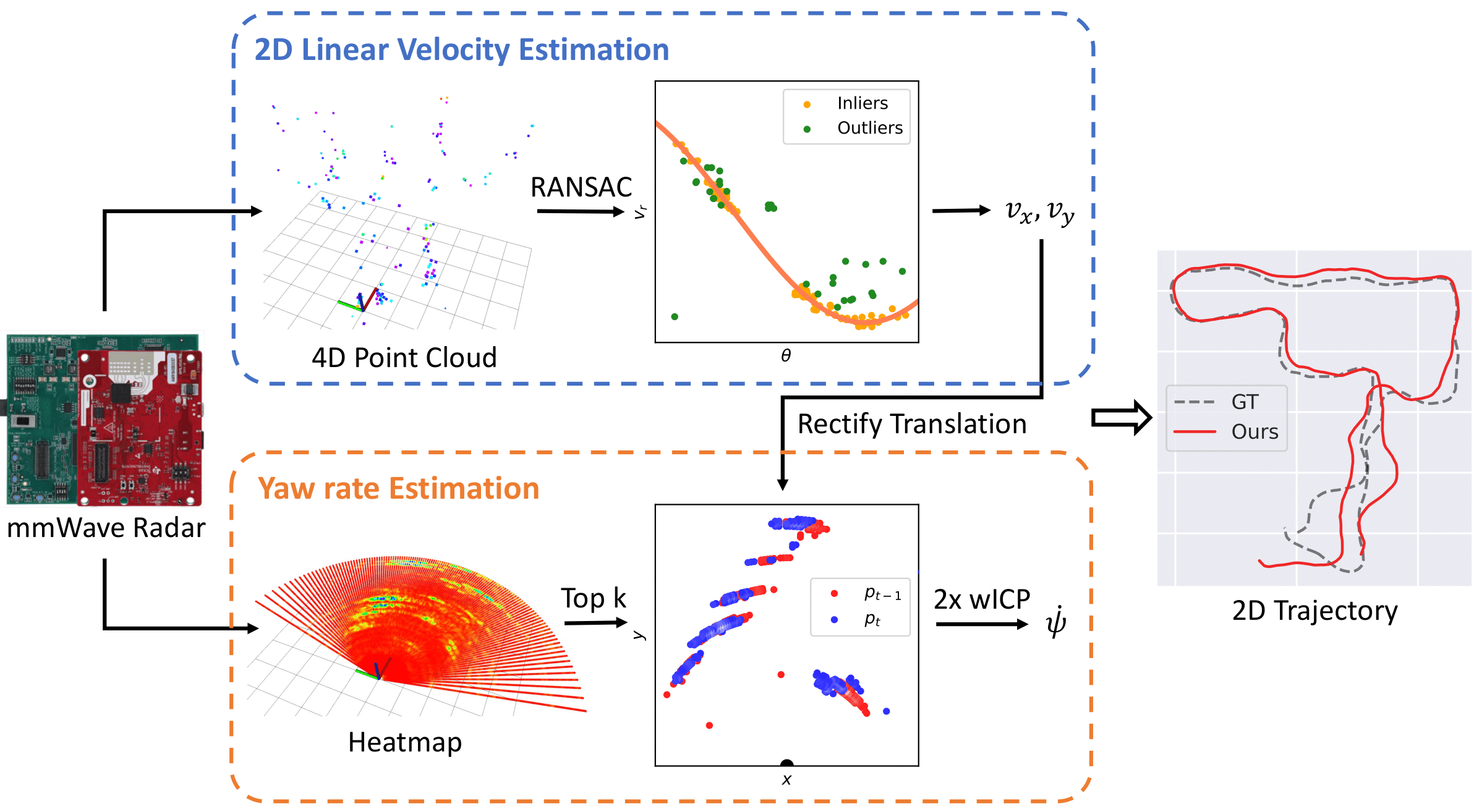
| May 1, 2024 | My peer-reviewed paper has accepted in IEEE ICRA 2024 Workshop on Radar in Robotics. |
| Feb 1, 2024 | I joined ETH Zurich as an exchange student, starting project intern in Vision for Robotics Lab |
Education
-
Stanford UniversityIncoming M.S. student in Aeronautics and AstronauticsSept. 2025 -Seoul National University (SNU)B.S. in Aerospace Engineering, summa cum laude (expected) GPA: 4.00/4.00(Major), 3.91/4.00(Overall)Mar. 2019 - Jun. 2025 (expected)ETH ZürichVisiting Student in Mechanical EngineeringFeb. 2024 - Aug. 2024Gyeonggi Science High School for the Gifted1-year early admissionMar. 2016 - Feb. 2019
Publication
Projects
-
 Knowledge-enabled Adaptive Locomotion Using Semantic SLAM with Active Learning German Aerospace Center (DLR) Guest Student Researcher Recursive Estimation, Active Learning, Semantic SLAMSept. 2024 - Feb. 2025
Knowledge-enabled Adaptive Locomotion Using Semantic SLAM with Active Learning German Aerospace Center (DLR) Guest Student Researcher Recursive Estimation, Active Learning, Semantic SLAMSept. 2024 - Feb. 2025 Crowd Navigation with LiDAR via Reinforcement Learning Perception and Learning for Robotics graduate course project, ETH Zürich [Video] [PDF] Teacher-Student RL, LiDAR EncodingMar. 2024 - Jun. 2024
Crowd Navigation with LiDAR via Reinforcement Learning Perception and Learning for Robotics graduate course project, ETH Zürich [Video] [PDF] Teacher-Student RL, LiDAR EncodingMar. 2024 - Jun. 2024 Distributed Optimization with Gaussian Belief Propagation for Continuous-time SLAM Vision for Robotics Lab. ETH Zürich Undergraduate Researcher [PDF] [Slides] [Code] Distributed Optimization, Continuous Time SLAMFeb. 2024 - Aug. 2024
Distributed Optimization with Gaussian Belief Propagation for Continuous-time SLAM Vision for Robotics Lab. ETH Zürich Undergraduate Researcher [PDF] [Slides] [Code] Distributed Optimization, Continuous Time SLAMFeb. 2024 - Aug. 2024 Display Virtual Cubes on Your Desk! Computer Vision course project, SNU [Video] [PDF] [Code] 3D Vision, Optical FlowMar. 2023 - Jun. 2023
Display Virtual Cubes on Your Desk! Computer Vision course project, SNU [Video] [PDF] [Code] 3D Vision, Optical FlowMar. 2023 - Jun. 2023 Autonomous Flight Landing in Quadrotor system Bulnabi, autonomous flight drone club [Code] Motion Planning, PX4-AutopilotJul. 2023 - Aug. 2023
Autonomous Flight Landing in Quadrotor system Bulnabi, autonomous flight drone club [Code] Motion Planning, PX4-AutopilotJul. 2023 - Aug. 2023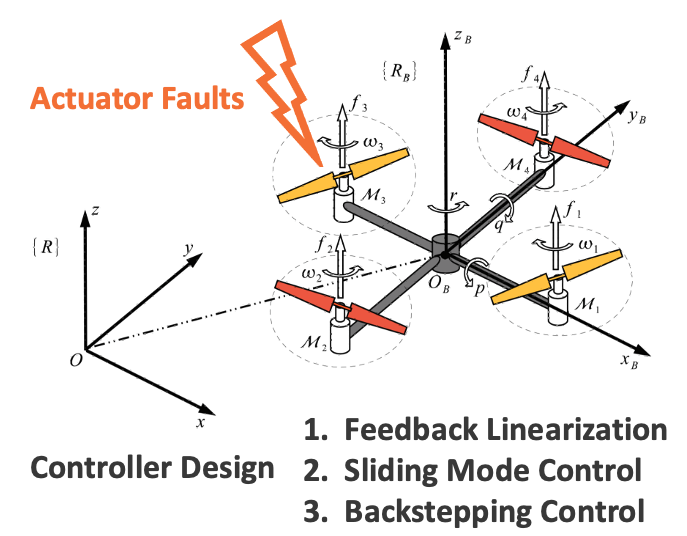 Fault Tolerant Control of Quadcopter Decision Making graduate course project, SNU [PDF] Sliding Mode Control, Backstepping Control, Feedback LinearizationMay. 2023 - Jun. 2023
Fault Tolerant Control of Quadcopter Decision Making graduate course project, SNU [PDF] Sliding Mode Control, Backstepping Control, Feedback LinearizationMay. 2023 - Jun. 2023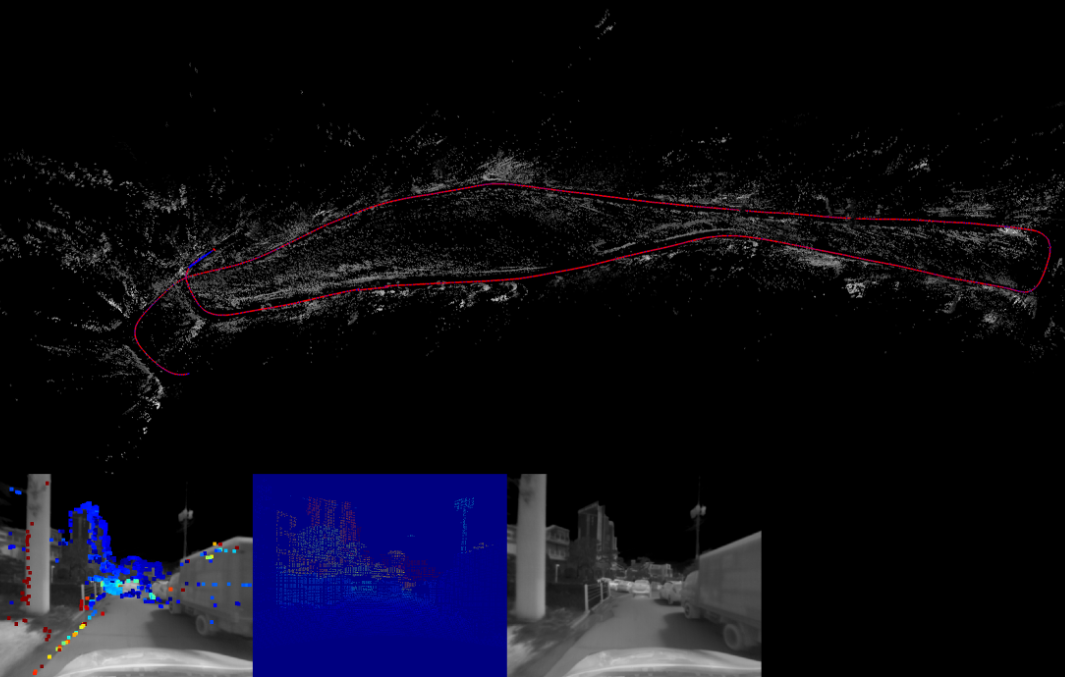 Thermal camera & Lidar Direct SLAM Robust Perception and Mobile Robotics Lab. SNU Undergraduate Researcher [Code] Direct SLAM, Visual-LiDAR FusionMar. 2023 - May. 2023
Thermal camera & Lidar Direct SLAM Robust Perception and Mobile Robotics Lab. SNU Undergraduate Researcher [Code] Direct SLAM, Visual-LiDAR FusionMar. 2023 - May. 2023 Modeling and Making Multimodal Sensor system Robust Perception and Mobile Robotics Lab. SNU Undergraduate Researcher Design and Manufacture, Multi-sensor Join CalibrationJan. 2023 - Feb. 2023
Modeling and Making Multimodal Sensor system Robust Perception and Mobile Robotics Lab. SNU Undergraduate Researcher Design and Manufacture, Multi-sensor Join CalibrationJan. 2023 - Feb. 2023 Organized AI Camp and Autonomous Race Car Competition for 200+ Nationwide Students AI Tech Play, non-profit organization for AI education Co-organizer, Hardware Team Leader [Website] [Youtube] Design and Manufacture, Motor Control, Software IntegrationFeb. 2021 - Aug. 2021
Organized AI Camp and Autonomous Race Car Competition for 200+ Nationwide Students AI Tech Play, non-profit organization for AI education Co-organizer, Hardware Team Leader [Website] [Youtube] Design and Manufacture, Motor Control, Software IntegrationFeb. 2021 - Aug. 2021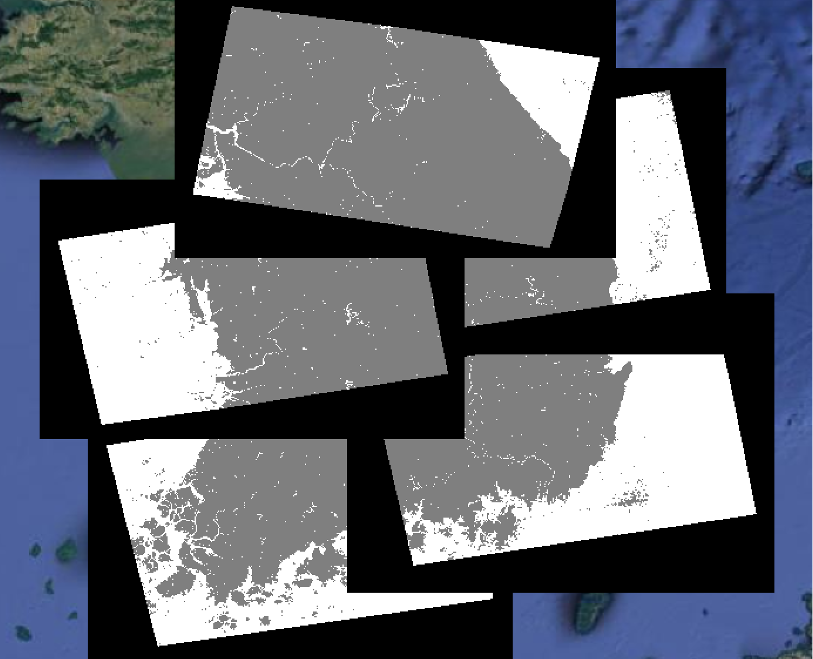 Real-time Flood Monitoring System by SAR Satellite Image Satellite Geophysics Lab. SNU Undergraduate Researcher [Website] Semantic Segmentation, System AutomationAug. 2020 - Dec. 2020
Real-time Flood Monitoring System by SAR Satellite Image Satellite Geophysics Lab. SNU Undergraduate Researcher [Website] Semantic Segmentation, System AutomationAug. 2020 - Dec. 2020
Awards
-
 1st Place, IEEE Humanoids 2024 Adult-sized Biped Walk Competition German Aerospace Center (DLR) Humanoid TORO Team [Video] [Website] Torque Control, Motion Planning, Divergent Component of MotionNov. 2024
1st Place, IEEE Humanoids 2024 Adult-sized Biped Walk Competition German Aerospace Center (DLR) Humanoid TORO Team [Video] [Website] Torque Control, Motion Planning, Divergent Component of MotionNov. 2024 Minister of National Defense Award, Minister of Defense Startup Competition Addit, Start-up Co-Founder [Video] [News] [Extension] Web Programming, UI/UX Design, EnterpriseFeb. 2022
Minister of National Defense Award, Minister of Defense Startup Competition Addit, Start-up Co-Founder [Video] [News] [Extension] Web Programming, UI/UX Design, EnterpriseFeb. 2022 Gold Prize, International Student Car Competition Autonomous Driving Sector SNU ZERO, autonomous driving car club Sensor Technician [Video] EKF-SLAM, LiDAR-Camera Fusion, ClusteringOct. 2021
Gold Prize, International Student Car Competition Autonomous Driving Sector SNU ZERO, autonomous driving car club Sensor Technician [Video] EKF-SLAM, LiDAR-Camera Fusion, ClusteringOct. 2021
Honors
-
Korea-Germany Junior Research Fellowship Support Max Planck POSTECH/KOREASept. 2024Global Leadership Program Scholarship Seoul National UniversityFeb. 2024Certificate of Appreciation (AI Tech Play) Deans, College of Engineering in Seoul National UniversityJun. 2021Kwanjeong Undergraduate Scholarship Kwanjeong Educational FoundationMar. 2021Undergraduate Research Internship Scholarship Seoul National UniversityMar. 2021
Patent
-
Parking Location Tracking System [KR102291377B1] Hojune Kim, Taekin Kim, Jinhwan Na, Jaeyoung Lee, Seunghwan Jeong2021
Personal Activties
-
 CH-47D Helicopter Flight Attendant Republic of Korea Army [News] Wild Fire Extinguishment, Helicopter Maintenance, Tactical missionsAug. 2021 - Feb. 2023
CH-47D Helicopter Flight Attendant Republic of Korea Army [News] Wild Fire Extinguishment, Helicopter Maintenance, Tactical missionsAug. 2021 - Feb. 2023
